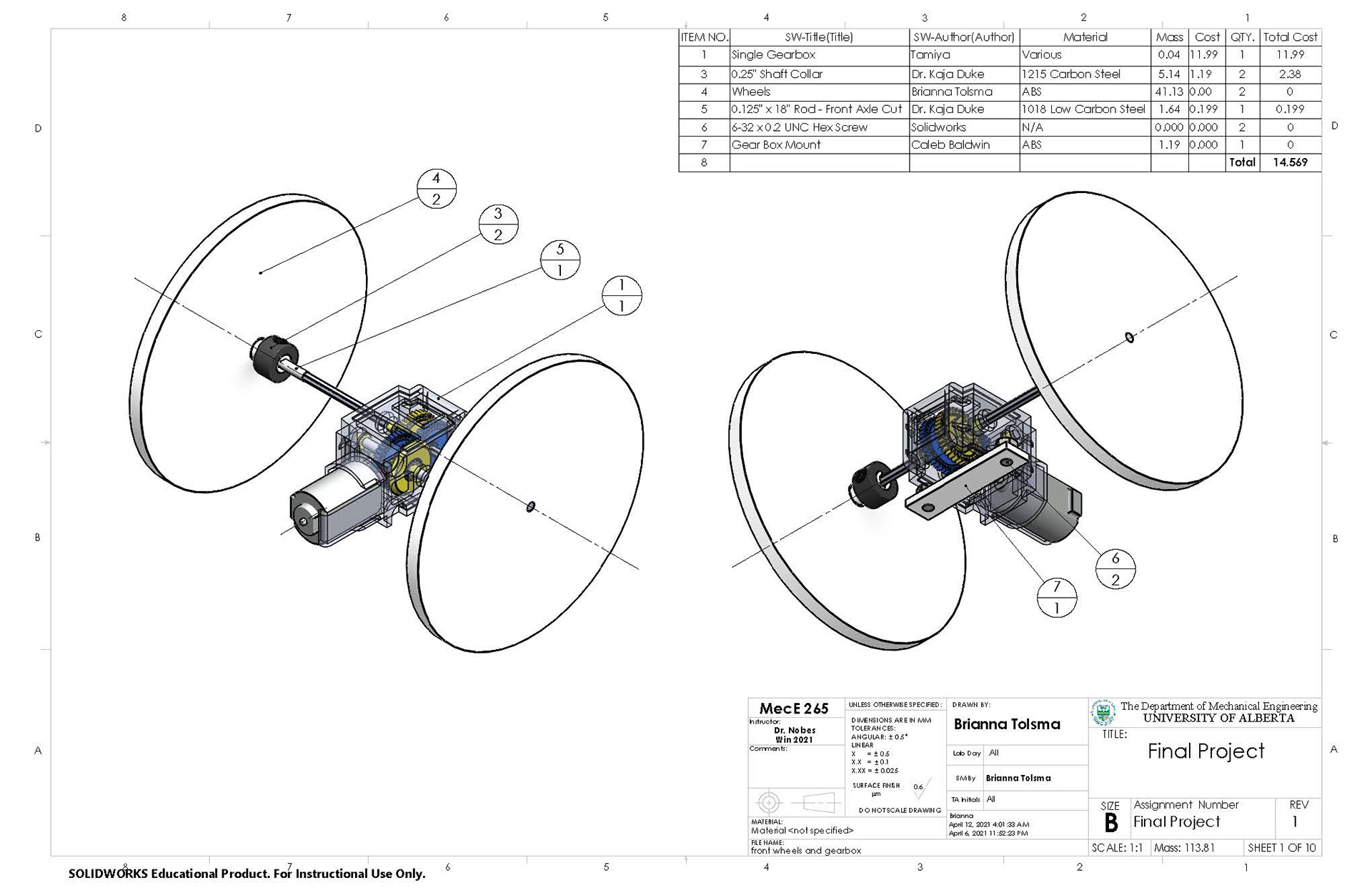
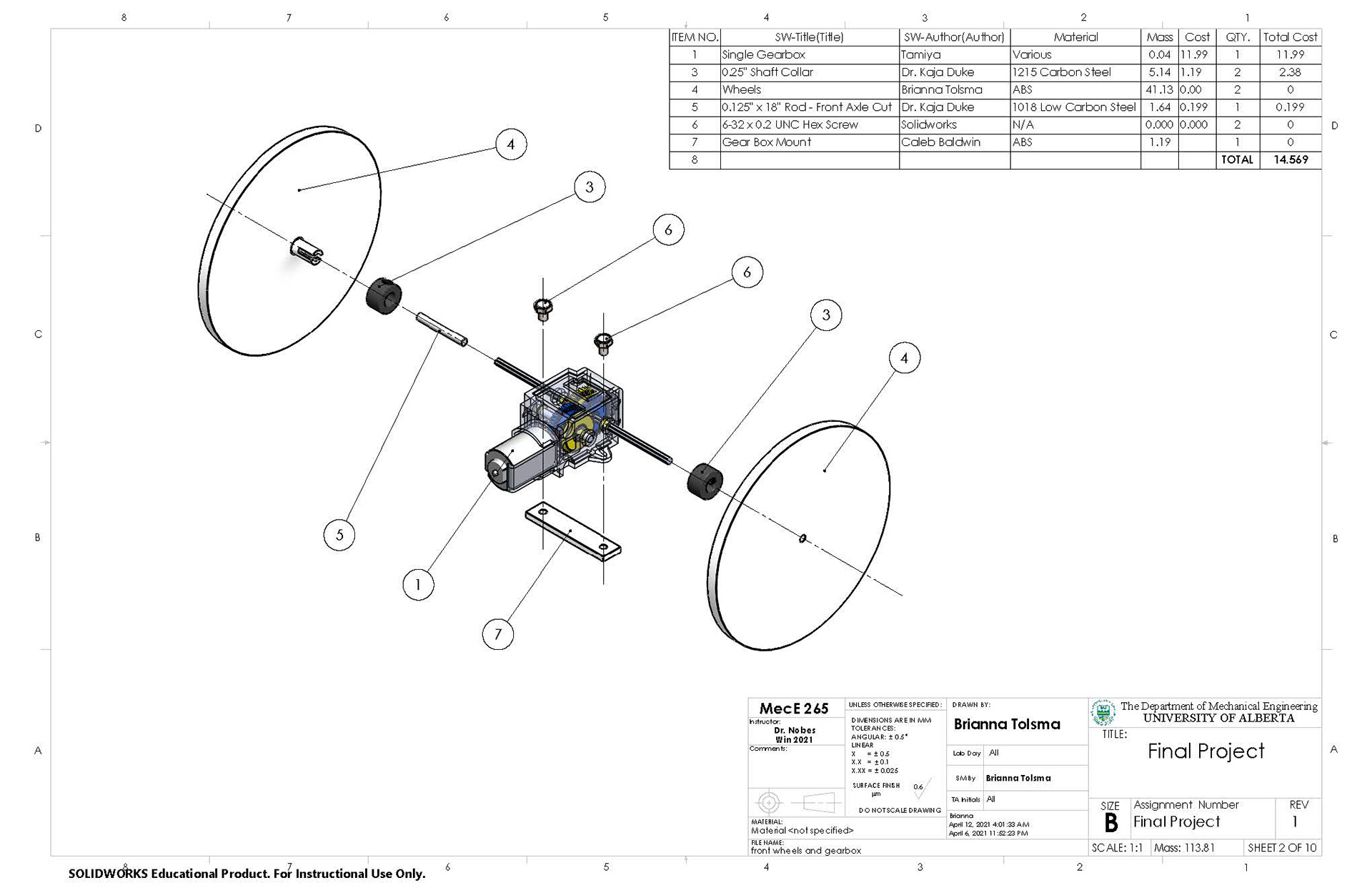
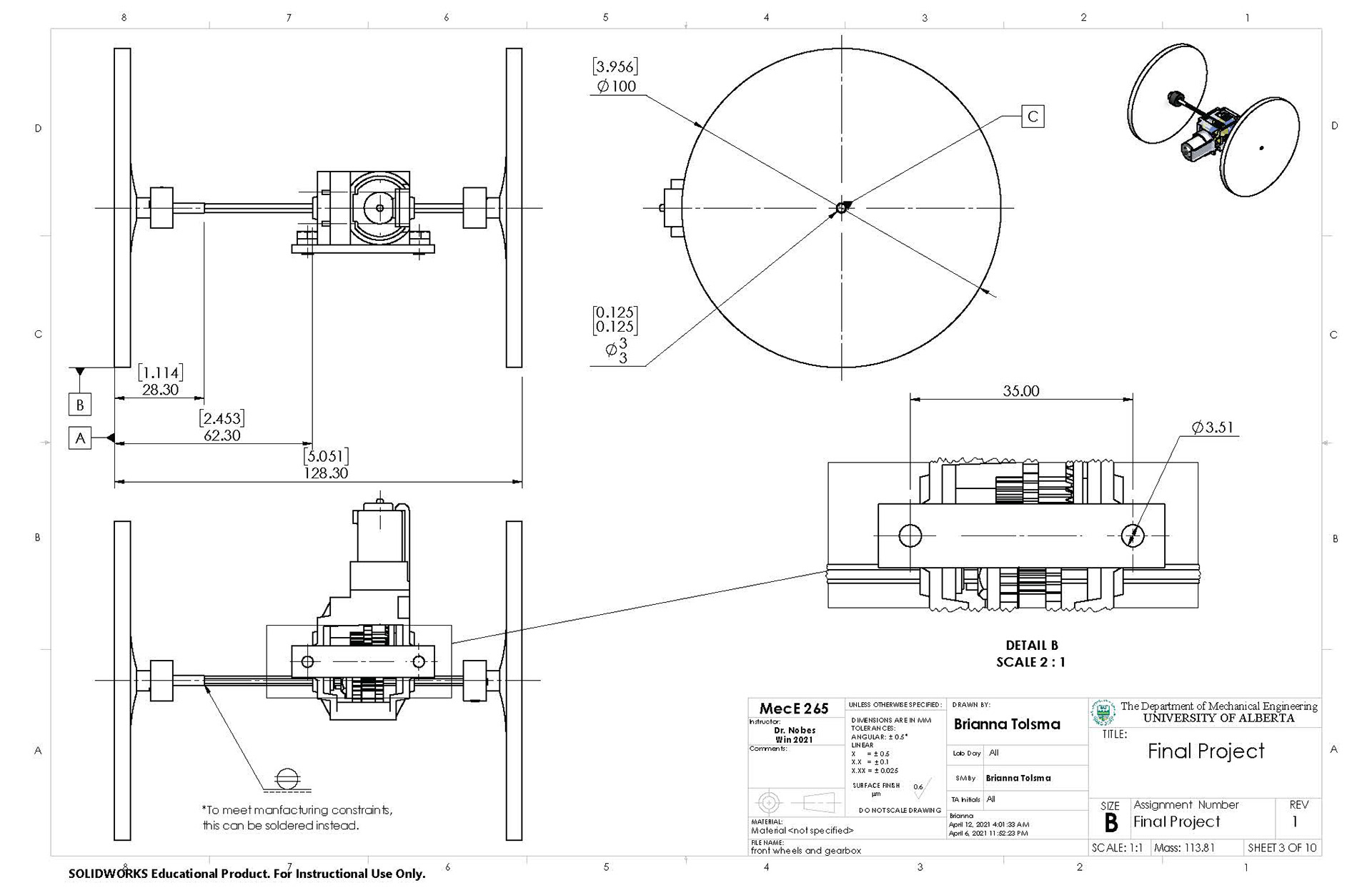
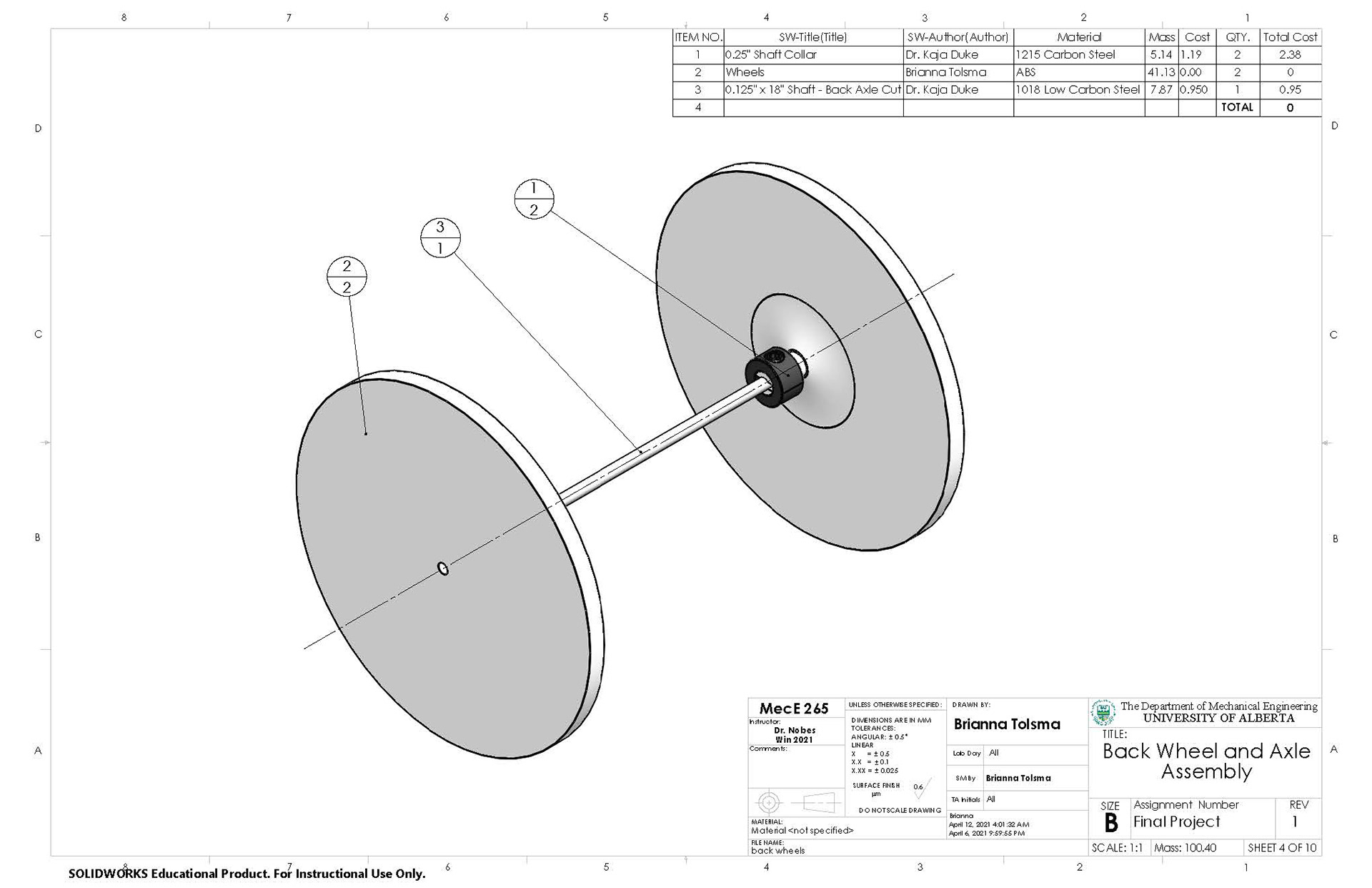
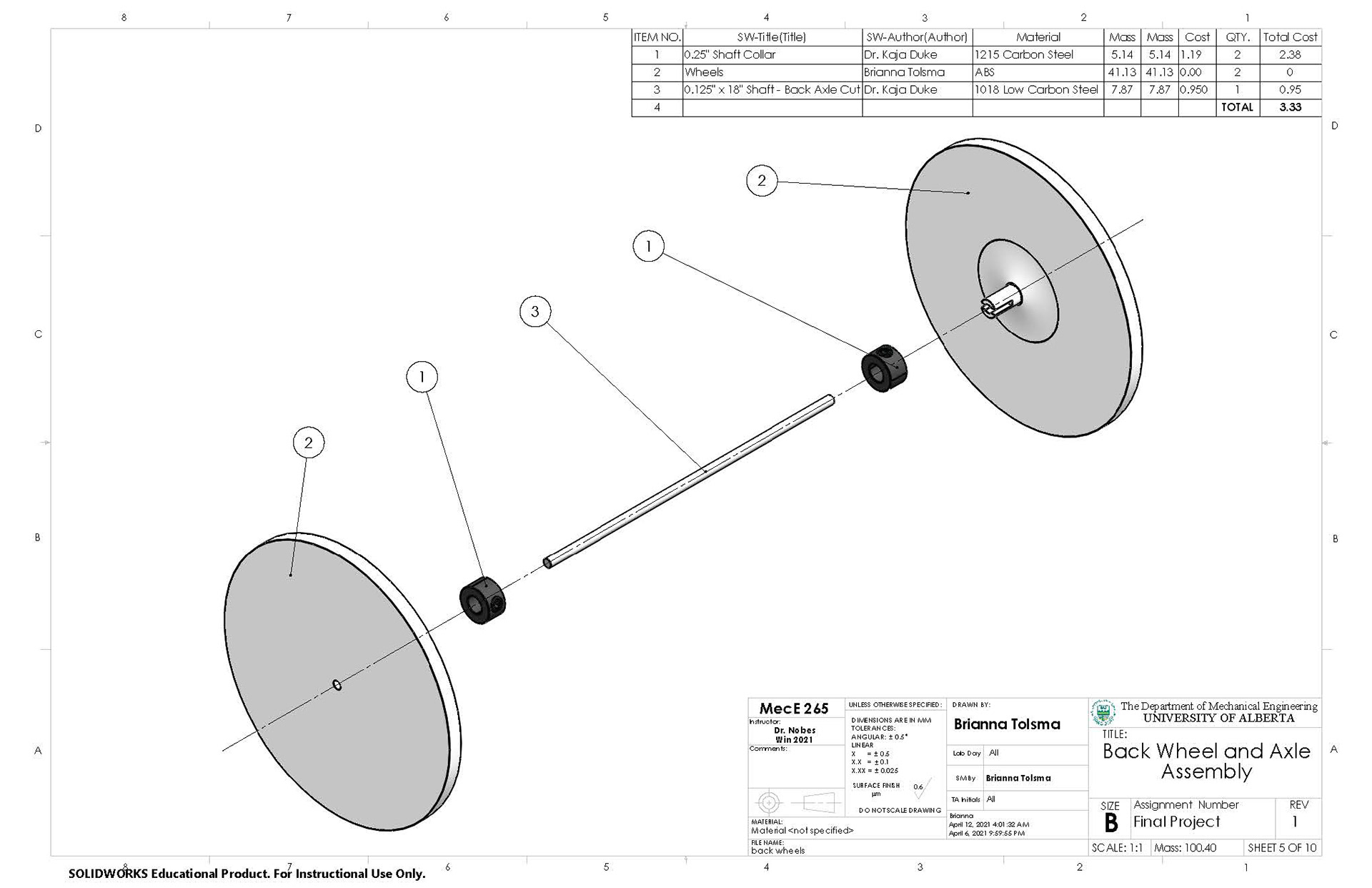
This was my contribution to my Mechanical Design I group-project. The goal of our project was to create a small robotic vehicle that could drive a cupcake to a target placed at an unknown distance and throw the cupcake at it.
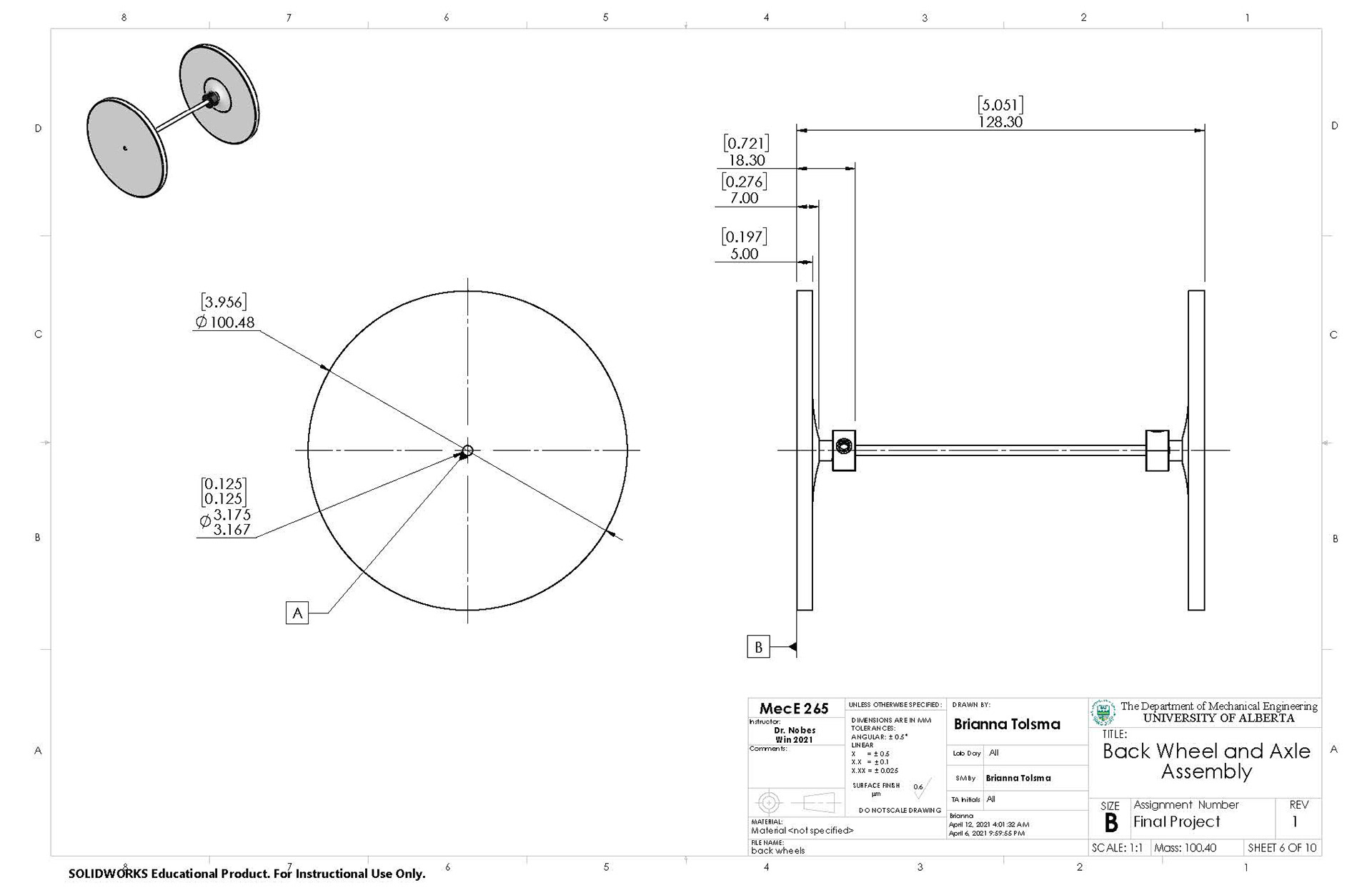
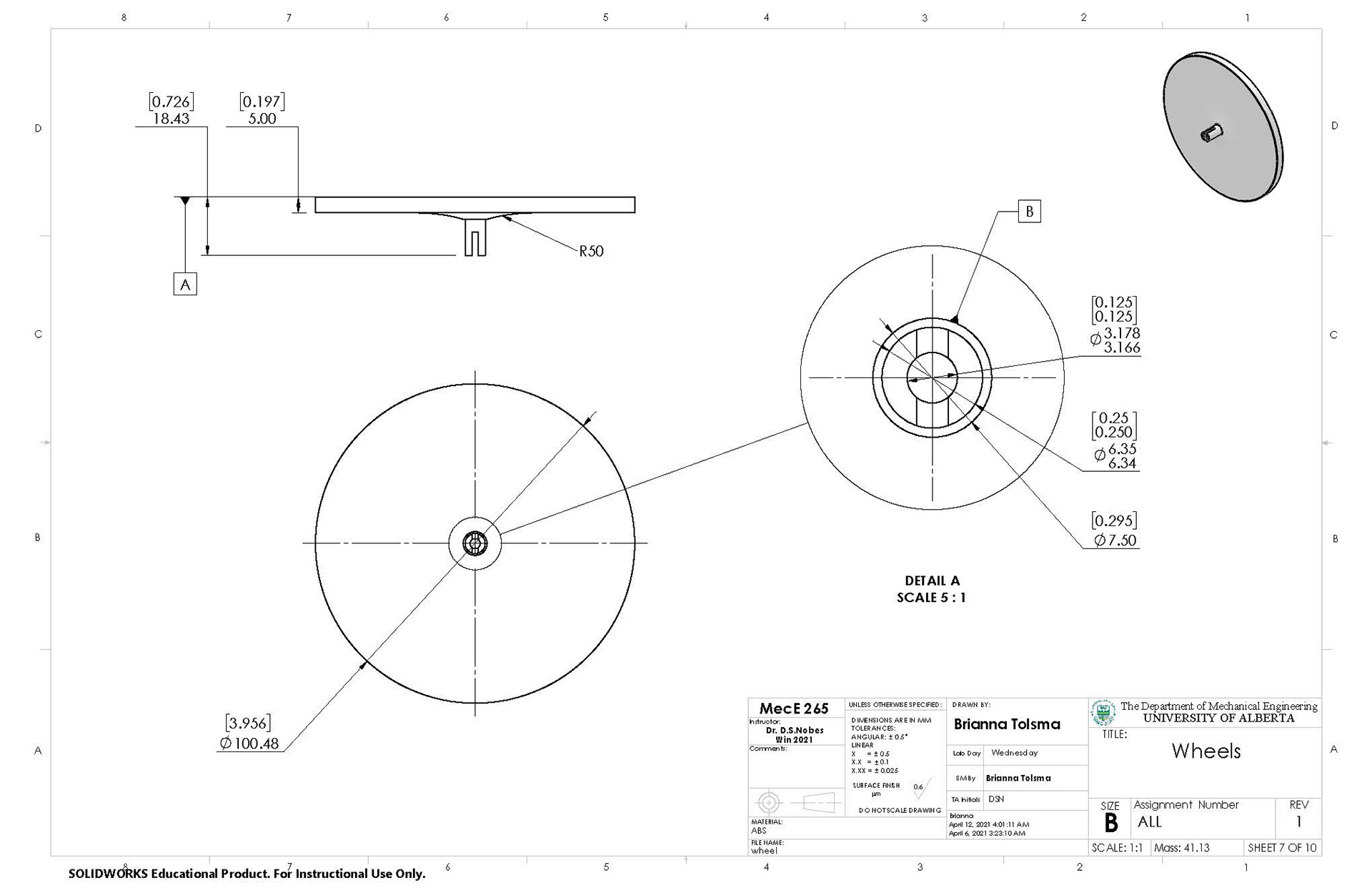
I was responsible for the torque and speed calculations to select a 3V motor and gearbox, optimizing the wheel diameter, designing easily manufacturable wheels and axles, and preparing the drawings below with the critical dimensions for the final report.